






Difference between brushed motor and brushless motor
-
Automation
-
Health & wellness
-
Life environment
-
Automotive
22 Oct. 2021
While the presence of brushes is the main factor differentiating brushed and brushless DC motors, it is not the only difference. This page explains the differences in how the two types of motor work and how they are controlled.
Different parts used in brushed and brushless DC motors
Motors are made up of a stator and rotor. The magnetic force generated when a current flows through the coil makes the rotor to rotate. All electric motors work this way, regardless of whether they are brushed or brushless.
However, there is a difference between brushed and brushless motors in stator & rotor design. Moreover, whereas the presence of brushes and commutator is essential given how a brushed DC motor achieves rotation, a brushless DC motor instead needs a drive circuit.
| Brushed DC motor | Brushless DC motor | |
|---|---|---|
| Rotor | Wound laminated core | Permanent magnet |
| Stator | Permanent magnet | Wound laminated core |
| Control | Brushes and commutator | Magnetic sensor and drive circuit |
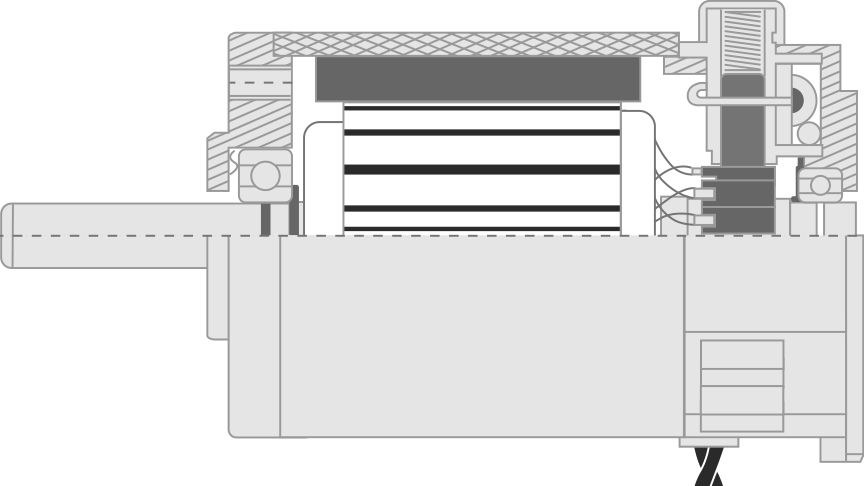
The rotor of a brushed DC motor has a construction of wound coil over a laminated core and a shaft. As the rotor rotates in the magnetic field, the commutator rotates along with it and by doing so comes into contact with each of the brushes alternately. Each time the commutator rotates from one brush to the other it reverses the direction of current flow in the coil, thereby maintaining the cyclic motion of the rotor and driving the motor. Control of the speed and torque of a brushed DC motor is done by varying the voltage and current.
In a brushless DC motor, in contrast, a permanent magnet forms part of the rotor assembly. Moreover, whereas the brushes and commutator in a brushed DC motor are in physical contact, there is no such contact in a brushless DC motor. Instead, current flow through the coil is alternated in accordance with the orientation of the rotor’s magnetic poles, which is determined by a sensor.
Different fundamental design of brushed and brushless DC motors
This section goes into more details about these differences in how the two types of motors are controlled.
Control of brushed DC motors
The rotation of a brushed DC motor is controlled by the brushes and commutator. The stator contains the field magnet and the electrical current flows through the coil in the rotor. That is, the electrical contact between brushes and commutator enables a current to flow from brush to commutator and then to the coil. This current flow in the coil generates a magnetic force (with a direction determined by Fleming’s left-hand rule) and this causes the rotor to turn. However, the direction of magnetic force shifts toward the center as the rotation approaches 90°, and this would cause rotation to stop.
To overcome this, the current cuts off shortly before the rotor reaches the 90° position. The rotor continues to rotate by inertia past 90° until the current starts to flow again, this time in the opposite direction. This reversed current direction drives the rotor from the 90° to the opposing 270° position where the direction of flow reverses once more. In other words, the rotation of the rotor causes the current flow through the coil to reverse every 180° and this in turn sustains the rotation.
Control of the motor torque and speed is done by varying the current in the coil, without changing the coil geometry, number of windings, or the flux density of the field magnet. The higher the current, the greater the torque and the faster the motor rotates.
Control of brushless DC motors
Control works differently in a brushless DC motor as the wound core is in the stator, the opposite configuration to a brushed DC motor.
A three-phase brushless DC motor with an outer rotor, for example, is made up of three stator coils connected to six switches. The magnetic polarity (N or S) of the coils is determined by whether these switches are on or off, and this is done in a way that causes the rotor to rotate. That is, the current flow is controlled so as to alternate the stator magnetic polarities in such a way that the attractive and repulsive magnetic forces make the rotor turn at high speed.
The elements that make up a control circuit for a brushless DC motor may include a magnetic polarity sensor for detecting motor speed, a circuit for comparing the actual motor speed against the reference speed, a circuit to calculate the required drive voltage, and a drive circuit that delivers this voltage.
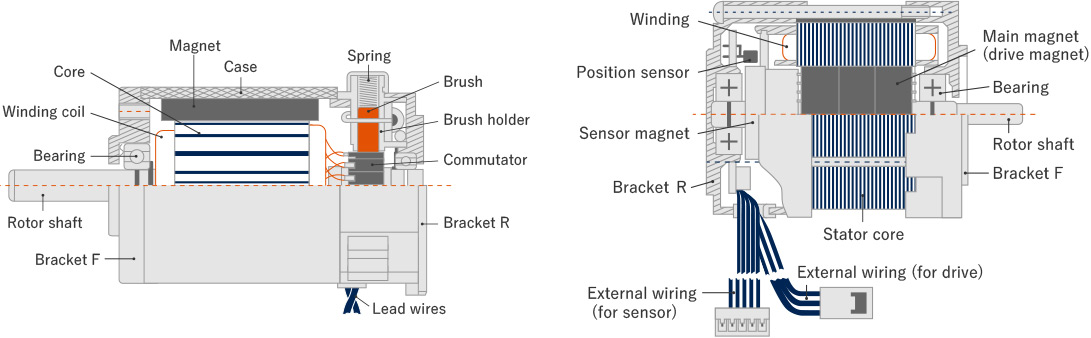 Brushed DC motor (left) and brushless DC motor (BLDC inner-rotor type: right)
Brushed DC motor (left) and brushless DC motor (BLDC inner-rotor type: right)
Different risks relating to durability and noise
The physical contact between the brushes and commutator in a brushed DC motor means that these parts wear with use. Furthermore, the associated risks of electrical noise, sparking, and acoustic noise make this contact problematic at high speeds. While brushed DC motors are good for keeping up-front costs low, the need for maintenance such as the routine inspection or replacement of parts has the potential to increase their long-term costs.
Meanwhile, the lack of brushes means that brushless DC motors do not suffer from the wear of these parts or electrical noise caused by brush contact. They are easy to control compared to brushed DC motors, being able to use a technique called sine-wave drive to deliver quiet operation with low levels of vibration and electrical noise. This is why brushless DC motors tend to be chosen for applications that require motors with long life and high efficiency.
Different in terms of whether or not rotor position sensor is needed
Because they rely on their ability to alternate the direction of current flow, brushed DC motors do not need to be able to detect rotor position.
Brushless DC motors, on the other hand, do need this ability because they are controlled based on the magnetic polarity of the rotor as it rotates through different positions. The detection of rotor position also helps maintain stable control of speed and torque.
Summary
Whereas brushed DC motors have brushes and a commutator, brushless DC motors require a control circuit. The two types of motor also have the opposite configuration in terms of whether the wound laminated core and permanent magnet are located in the stator or the rotor. These various differences should be into account to choose the best motor for each application.
Overcoming your problems with brushless DC motors
ASPINA supplies not only standalone brushless DC motors, but also system products that incorporate drive and control systems as well as mechanical design. These are backed by comprehensive support that extends from prototyping to commercial production and after-sales service.
ASPINA can offer solutions that are tailored to suit the functions and performance demanded by a diverse range of industries, applications, and customer products, as well as your particular production arrangements.
ASPINA supports not only customers who already know their requirements or specifications, but also those who are facing problems at early stages of development.
Do you struggle with the following concerns?
- Motor selection
-
- Don't have detailed specifications or design drawings yet, but need advice on motors?
- Don't have anyone in-house with expertise in motors and can't identify what sort of motor will work best for your new product?
- Motor and associated component development
-
- Want to focus your resources on core technology, and outsource drive systems and motor development?
- Want to save the time and effort of redesigning existing mechanical components when replacing your motor?
- Unique requirement
-
- Need a custom motor for your product, but been declined from your usual vendor?
- Can't find a motor that gives you the control you require, and about to give up hope?
Seeking answers to these problems? Contact ASPINA, we’re here to help.
List of the same series columns
- NEMA17 stepper motor selection guide: Mounting dimensions, applications, selection and problem solving
- NEMA stepper motor sizes chart and selection guide
- What does a stepper motor do?
- Applications for blower motor
- What is a blower motor?
- Advantages of brushless DC motors over brushed DC motors
- Features and applications of DC motors
- Is this brushless motor cheap or expensive? - What factors determine its price?
- Different types of DC motor and their respective features
- What is a geared brushless DC motor?
- How does an electronic speed controller for a brushless DC motor work? And what should you consider when you choose the right one?
- Small brushless motors
- What are the disadvantages of brushless DC motors? And how can they be overcome?
- Advantages of brushless DC motors: How they differ from brushed DC motors
- What is an actuator?
- How do brushless DC motors work? The need for a drive circuit explained
- Do brushless DC motors require a drive circuit? – Controlling brushless DC motors
- What is a stepper motor?
- What is an electric motor?
- What is a brushless DC motor?
- How are stepper motors controlled? - Speed control of stepper motors
- How do brushed DC motors work? The need for regular maintenance explained
- How are DC motors controlled? - Speed control of DC motors
- Brushless DC motor applications: examples that demonstrate their features
- Stepper motor applications: Examples that demonstrate their features
- Motors designed for easy control: How do stepper motors work?
- What are the differences between brushed and brushless DC motors?
- What is a PSC motor
- What is a servo motor?
- What is a blower?
- What is a DC motor? - features and mechanisms
Related information
-
NEMA17 stepper motor selection guide: Mounting dimensions, applications, selection and problem solving

-
IEC 60601-1 explained: Key motor selection considerations for medical devices
-
ASPINA’s new servo motors enhance competitiveness in medical device development
-
NEMA stepper motor sizes chart and selection guide

Contact us for more information
- New inquiry
- Prototype
- Upgrade
- Customization
- Your spec
- Literature
- Support
- Others